Amerikanske forskere har udviklet en ny blød, fleksibel og tilpasselig prøveudtagningsenhed, der kan hjælpe med indsamling af forskellige typer organismer fra havet uden at skade dem.
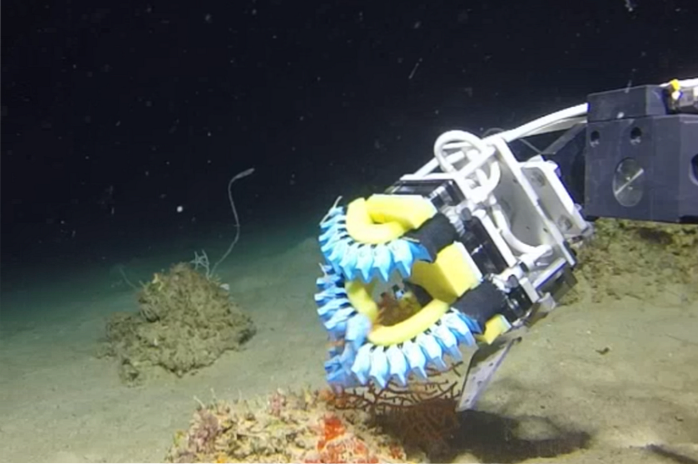
Den "bløde griber" -enhed, der har to til fem "fingre" lavet af polyurethan og andre squishy-materialer, der åbnes og lukkes via et hydraulisk pumpesystem med lavt tryk, der bruger havvand til at drive deres bevægelse.
At studere de marine undervandsorganismer krævede specialudstyr monteret på et fjernstyret køretøj (ROV), da enhver anden type udstyr kunne knække under tryk.
"Mange af de dyr, vi støder på i dybhavet, er nye arter, og disse bløde robotter giver os mulighed for delikat at interagere og studere en mere forskelligartet række af fauna," sagde David Gruber, professor ved City University of New York..
Griberne blev fastgjort til en trækugle, der blev holdt og manipuleret ved hjælp af ROVs, hårde klo-lignende værktøjer, styret af en menneskelig operatør på det skib, som ROV var bundet til.
I undersøgelsen, der blev offentliggjort i tidsskriftet PLOS ONE, satte holdet den nyeste version af deres bløde gribere på prøve på en rejse ombord R / V Falkor i det fjerntliggende Phoenix Islands Protected Area i det sydlige Stillehav.
De bløde gribere var i stand til at samle havsnegle, koraller, svampe og andet havliv meget mere effektivt og med mindre skade end traditionelle undervandsprøvetagningsværktøjer.
Baseret på input fra ROV-operatørerne, team 3D-trykte "fingernegle" -udvidelser, der kunne føjes til griberens fingre for at hjælpe dem med at komme under prøver, der sad på hårde overflader.
Et fleksibelt mesh blev også tilføjet til hver finger for at hjælpe med at holde prøver indeholdt i fingrene.
En anden version med to fingre af gribere blev også oprettet baseret på ROV-pilots fortrolighed med at kontrollere eksisterende tofingrede gribere, og deres anmodning om, at de to fingre kunne holde prøver med begge en "knivspids" (til små genstande) og en "power" greb (for store genstande).


